AIM
4/20/23
2
−
1
−
8
Airport Lighting Aids
FIG 2
−
1
−
9
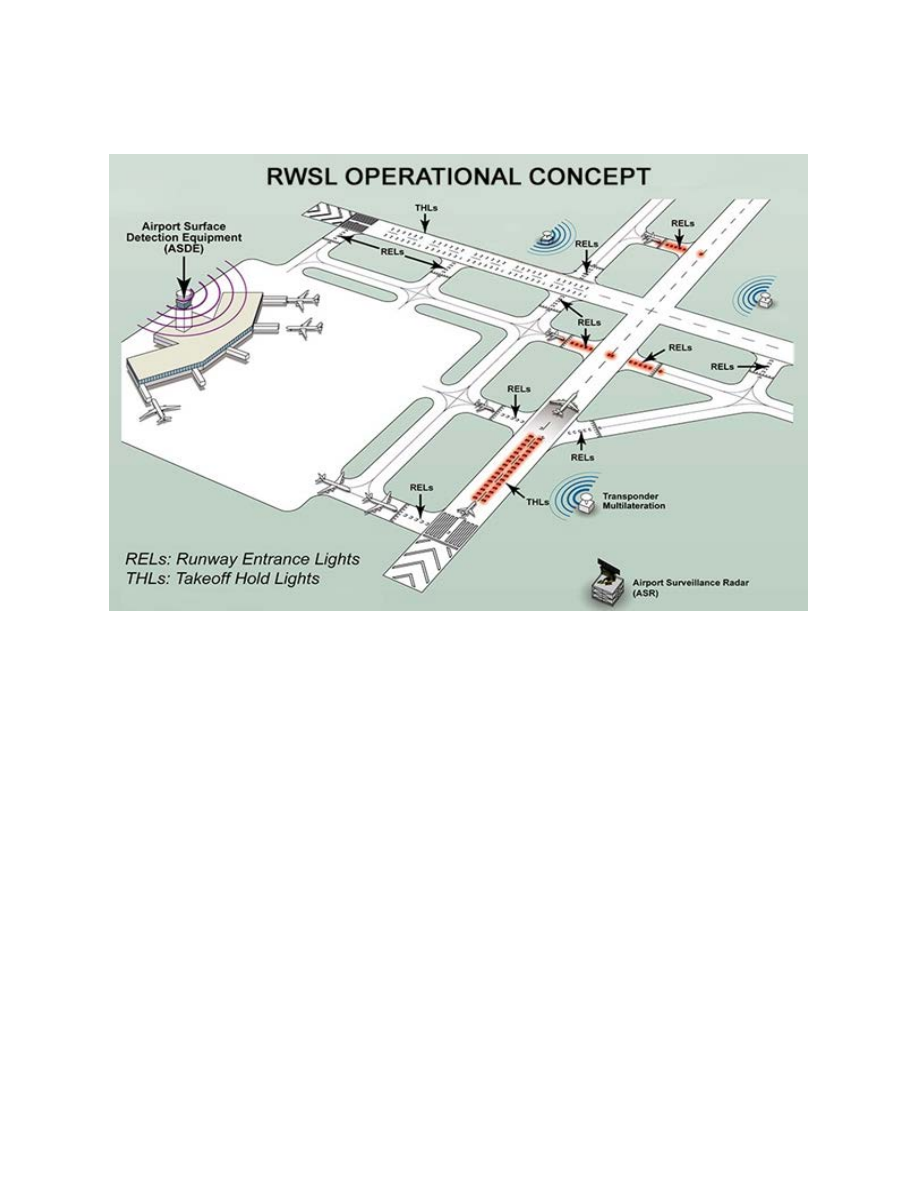
Runway Status Light System
c.
Takeoff Hold Lights (THL) : The THL system is composed of flush mounted, in-pavement, unidirectional
light fixtures in a double longitudinal row aligned either side of the runway centerline lighting. Fixtures are
focused toward the arrival end of the runway at the “line up and wait” point. THLs extend for 1,500 feet in front
of the holding aircraft starting at a point 375 feet from the departure threshold (see FIG 2
−
1
−
11). Illuminated red
lights provide a signal, to an aircraft in position for takeoff or rolling, that it is unsafe to takeoff because the
runway is occupied or about to be occupied by another aircraft or ground vehicle. Two aircraft, or a surface
vehicle and an aircraft, are required for the lights to illuminate. The departing aircraft must be in position for
takeoff or beginning takeoff roll. Another aircraft or a surface vehicle must be on or about to cross the runway.
1.
THL Operating Characteristics
−
Departing Aircraft: THLs will illuminate for an aircraft in position for
departure or departing when there is another aircraft or vehicle on the runway or about to enter the runway (see
FIG 2
−
1
−
9.) Once that aircraft or vehicle exits the runway, the THLs extinguish. A pilot may notice lights
extinguish prior to the downfield aircraft or vehicle being completely clear of the runway but still moving. Like
RELs, THLs have an “anticipated separation” feature.
NOTE
−
When the THLs extinguish, this is not clearance to begin a takeoff roll. All takeoff clearances will be issued by ATC.
2.
What a pilot would observe: A pilot in position to depart from a runway, or has begun takeoff roll, will
observe THLs illuminate in reaction to an aircraft or vehicle on the runway or entering or crossing it. Lights will
extinguish when the runway is clear. A pilot may observe several cycles of illumination and extinguishing
depending on the amount of crossing traffic.
3.
When a pilot observes the red light of the THLs, the pilot should safely stop if it’s feasible or remain
stopped. The pilot must contact ATC for resolution if any clearance is in conflict with the lights. Should pilots
note illuminated lights while in takeoff roll and under circumstances when stopping is impractical for safety